La solution analytique du problème d'inversion, permettant de retrouver une
image 2D ![]() à partir de ses projections
à partir de ses projections
![]() , est
un problème connu et résolu depuis plus de 80 ans par un mathématicien autrichien
(Radon 1917). Si on prend le temps d'en rappeler les rudiments ici, c'est que
le cas bidimensionnel contient en lui même les fondements du problème plus complexe
que constitue la reconstruction 3D. En effet, les opérations de filtrage, de
rétroprojection, le théorème de la section centrale sont des composantes présentes
aussi bien en 2D qu'en 3D. La reconstruction 2D représentant une version allégée
du cas 3D, nous traiterons ultérieurement les problèmes inhérents au seul cas
du 3D.
, est
un problème connu et résolu depuis plus de 80 ans par un mathématicien autrichien
(Radon 1917). Si on prend le temps d'en rappeler les rudiments ici, c'est que
le cas bidimensionnel contient en lui même les fondements du problème plus complexe
que constitue la reconstruction 3D. En effet, les opérations de filtrage, de
rétroprojection, le théorème de la section centrale sont des composantes présentes
aussi bien en 2D qu'en 3D. La reconstruction 2D représentant une version allégée
du cas 3D, nous traiterons ultérieurement les problèmes inhérents au seul cas
du 3D.
Dans la première partie de cette thèse, nous avons, de manière approfondie,
cherché à modéliser le lien qui unit l'objet radioactif à ses projections. Lorsqu'on
se place dans un contexte continu, nous avons montré que chaque élément du sinogramme
![]() comptabilisait les nombres de paires de photons
comptabilisait les nombres de paires de photons ![]() émises par l'objet radioactif
émises par l'objet radioactif ![]() suivant la ligne de coïncidence
référencée par
suivant la ligne de coïncidence
référencée par
![]() . Il s'agissait d'une projection.
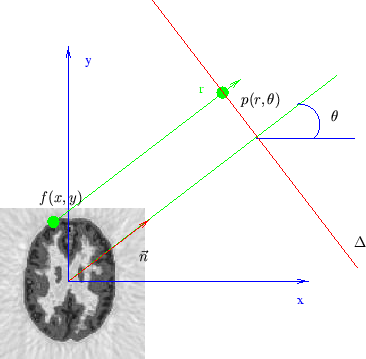
En termes mathématiques, on considère que
. Il s'agissait d'une projection.
En termes mathématiques, on considère que
![]() intègre l'information
relative à cet objet sur une droite (Fig.7.1):
intègre l'information
relative à cet objet sur une droite (Fig.7.1):

L'opération de rétroprojection correspond en fait à un épandage. La rétroprojection
élémentaire permet de construire à partir
d'une projection suivant un angle ![]() une fonction
une fonction
![]() .
Cette fonction est obtenue en affectant à chaque point
.
Cette fonction est obtenue en affectant à chaque point ![]() le nombre
de paires de photons émises
le nombre
de paires de photons émises
![]() .
. ![]() indique l'abscisse
où se projette ce point suivant une direction
indique l'abscisse
où se projette ce point suivant une direction ![]() (
(
![]() ).
La rétroprojection élémentaire conduit donc à:
).
La rétroprojection élémentaire conduit donc à:
Cette opération élémentaire nous permet de définir la rétroprojection, opération qui consiste à sommer l'ensemble de ces rétroprojections élémentaires pour toutes les directions de projections possibles:

Ce théorème, dont la preuve peut être trouver dans [66], traduit un
lien entre la transformée de Fourier 1D(
![]() )
des projections
)
des projections
![]() et la transformée de Fourier 2D (
et la transformée de Fourier 2D (
![]() )
de l'objet
)
de l'objet ![]() .
.
Pour reconstruire notre image partant de sa transformée de Fourier exprimée en coordonnées polaires, nous utilisons la définition de la transformée de Fourier:


 |
|||
 |
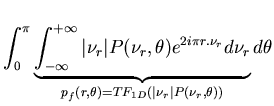
L'image ![]() s'obtient donc comme la rétroprojection, non pas des projections
simples, mais des projections filtrées
s'obtient donc comme la rétroprojection, non pas des projections
simples, mais des projections filtrées
![]() .(Eq.7.3).
Le filtre est simple, et nous avons directement son expression dans le domaine
fréquentiel: il s'agit du filtre monodimensionnel rampe
.(Eq.7.3).
Le filtre est simple, et nous avons directement son expression dans le domaine
fréquentiel: il s'agit du filtre monodimensionnel rampe
![]() .
L'algorithme de reconstruction comporte donc deux étapes:
.
L'algorithme de reconstruction comporte donc deux étapes:
D'un point de vue totalement théorique, les opérateurs utilisés étant tous linéaires,
il n'y a pas de contradiction à rétroprojeter les projections et à filtrer l'image
épandue ![]() ensuite par un filtre rampe bidimensionnel
ensuite par un filtre rampe bidimensionnel
![]() ,
nous avons alors:
,
nous avons alors:
N'en déplaise aux puristes de la langue française, il faut noter une faiblesse de la langue française pour traduire la différence entre ces deux algorithmes de manière simple, c'est pourquoi les acronymes utilisés (FBP et BPF) seront construits sur les noms des algorithmes exprimés en langue anglaise.
Nous venons de voir que pour reconstruire notre image, nous étions amenés à
utiliser le filtre rampe
![]() . L'utilisation de ce
filtre rampe pose deux problèmes majeurs:
. L'utilisation de ce
filtre rampe pose deux problèmes majeurs:
Dans le cas de la reconstruction d'un objet ![]() bidimensionnel, les
projections étaient bidimensionnelles
bidimensionnel, les
projections étaient bidimensionnelles
![]() . Le système était
donc totalement défini analytiquement et la solution de notre système était
unique. En 3D cependant, l'intégration sur les lignes de coïncidence est spécifiée
par 4 paramètres
. Le système était
donc totalement défini analytiquement et la solution de notre système était
unique. En 3D cependant, l'intégration sur les lignes de coïncidence est spécifiée
par 4 paramètres
![]() . Or le volume que l'on doit reconstruire
ne comporte que trois variables
. Or le volume que l'on doit reconstruire
ne comporte que trois variables ![]() , le problème d'inversion est
donc surdéterminé. En effet, en se limitant aux projections situées dans des
plans perpendiculaires à l'axe du cylindre (
, le problème d'inversion est
donc surdéterminé. En effet, en se limitant aux projections situées dans des
plans perpendiculaires à l'axe du cylindre (![]() ), nous disposons
de suffisamment d'information pour reconstruire l'objet, du moins en faisant
une reconstruction 2D tranche par tranche (i.e. en faisant varier
), nous disposons
de suffisamment d'information pour reconstruire l'objet, du moins en faisant
une reconstruction 2D tranche par tranche (i.e. en faisant varier ![]() ).
D'un point de vue purement analytique, l'information supplémentaire apportée
par les acquisitions suivant les autres inclinaisons (
).
D'un point de vue purement analytique, l'information supplémentaire apportée
par les acquisitions suivant les autres inclinaisons (
![]() ) est
superflue. Enfin, cela reste vrai tant qu'on ne fait pas intervenir de considérations
statistiques ! De toute façon, cette surdétermination nous conduit à une solution
qui n'est plus unique. Idéalement, toutes les solutions conduisent à la même
estimation du volume. Malheureusement dans le monde réel, c'est-à-dire en présence
de bruit, la solution varie sensiblement. Suivant une approche proche de celle
de Defrise [30], nous allons voir les éléments qui constituent les
fondements de la reconstruction analytique 3D.
) est
superflue. Enfin, cela reste vrai tant qu'on ne fait pas intervenir de considérations
statistiques ! De toute façon, cette surdétermination nous conduit à une solution
qui n'est plus unique. Idéalement, toutes les solutions conduisent à la même
estimation du volume. Malheureusement dans le monde réel, c'est-à-dire en présence
de bruit, la solution varie sensiblement. Suivant une approche proche de celle
de Defrise [30], nous allons voir les éléments qui constituent les
fondements de la reconstruction analytique 3D.
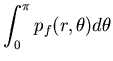
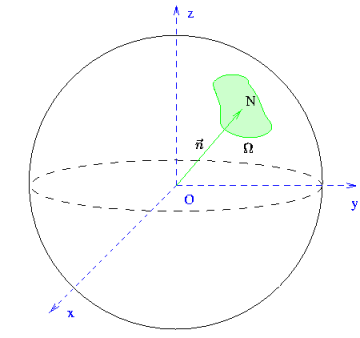
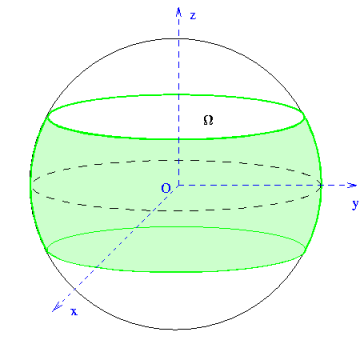
Tout plan de projection ![]() est défini par une direction de projection
est défini par une direction de projection
![]() , donc par deux angles
, donc par deux angles
![]() . Ce vecteur
. Ce vecteur ![]() étant un vecteur unitaire, sa norme est égale à 1. Si on prend pour représentant
de ce vecteur, le vecteur
étant un vecteur unitaire, sa norme est égale à 1. Si on prend pour représentant
de ce vecteur, le vecteur
![]() dont une extrémité
dont une extrémité
![]() est située sur l'origine du repère et si on s'intéresse au lieu géométrique
que dessine l'autre extrémité
est située sur l'origine du repère et si on s'intéresse au lieu géométrique
que dessine l'autre extrémité ![]() lorsque
lorsque
![]() varient
dans
varient
dans
![]() , on constate que
ce point
, on constate que
ce point ![]() décrit une sphère de rayon unité. Nous appellerons cette sphère,
la sphère des projections.
décrit une sphère de rayon unité. Nous appellerons cette sphère,
la sphère des projections.
Or l'ensemble des valeurs que peuvent prendre les deux angles ![]() et
et ![]() est lié à la géométrie d'acquisition. En effet, ces angles sont
fixés par les couples de détecteurs. Par conséquent, le lieu géométrique que
dessine le vecteur
est lié à la géométrie d'acquisition. En effet, ces angles sont
fixés par les couples de détecteurs. Par conséquent, le lieu géométrique que
dessine le vecteur ![]() est fonction de la géométrie. C'est en général
un sous ensemble de la sphère des projections. C'est ce sous ensemble que nous
désignons par
est fonction de la géométrie. C'est en général
un sous ensemble de la sphère des projections. C'est ce sous ensemble que nous
désignons par ![]() , qui constitue l'ensemble des projections. La figure
Fig.7.4
, qui constitue l'ensemble des projections. La figure
Fig.7.4
|
[ |
[ |
|

|
|
[ |
[ |

|
|
Comme précédemment le théorème de section centrale traduit un lien, dans l'espace
de Fourier, entre les projections et l'objet radioactif. Un plan de l'espace
de Fourier 3D de l'objet (
![]() )
et perpendiculaire à la direction de projection
)
et perpendiculaire à la direction de projection ![]() correspond à
la transformée de Fourier 2D des projections (
correspond à
la transformée de Fourier 2D des projections (
![]() )
pour cette même direction de projection (Fig.7.5).
)
pour cette même direction de projection (Fig.7.5).
![\resizebox*{0,45\textwidth}{!}{\psfrag{Cercle}[][][2]{\( \Omega \)} \psfrag{x}[]...
...\)} \psfrag{PiF4}[][][2]{\( \Pi ^{F}_{4} \)}\includegraphics{imgps/rre_fig5.ps}}](img843.png)
|
![\resizebox*{0,45\textwidth}{!}{\psfrag{Cercle}[][][2]{\( \Omega \)} \psfrag{x}[]...
...\)} \psfrag{PiF4}[][][2]{\( \Pi ^{F}_{4} \)}\includegraphics{imgps/rre_fig6.ps}}](img844.png)
|
| [Dans l'espace de l'objet.] | [Dans l'espace de Fourier.] |
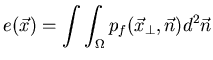
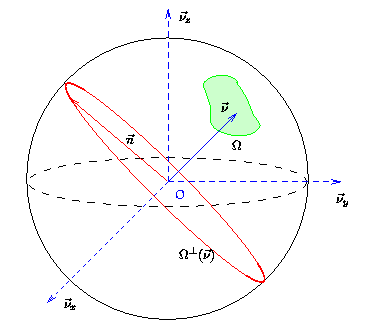
Nous pouvons toujours décomposer le vecteur
![]() , comme la somme
de deux vecteurs
, comme la somme
de deux vecteurs
![]() et
et
![]() . Le premier
. Le premier
![]() représente un vecteur situé dans le plan perpendiculaire
au vecteur de projection
représente un vecteur situé dans le plan perpendiculaire
au vecteur de projection ![]() (plan
(plan ![]() de projection) . Le
deuxième
de projection) . Le
deuxième
![]() est colinéaire à la direction de projection
est colinéaire à la direction de projection
![]() . Nous avons:
. Nous avons:
Dans l'Eq. 7.4, il est nécessaire de bien comprendre l'expression:
![]() correspond donc à l'ensemble des
directions de projection
correspond donc à l'ensemble des
directions de projection ![]() pour lesquelles la fréquence
pour lesquelles la fréquence
![]() appartient au plan
appartient au plan ![]() de projection construit sur
de projection construit sur ![]() .
.
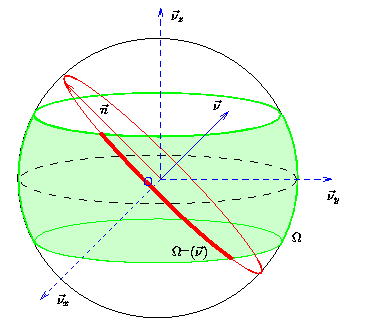
Nous avons vu également que la géométrie d'acquisition limitait les directions
de projection à ![]() . Ainsi de manière générale, l'équation Eq.7.5
fournit un jeu de directions qui correspond à l'intersection de
. Ainsi de manière générale, l'équation Eq.7.5
fournit un jeu de directions qui correspond à l'intersection de ![]() et
et
![]() . Muni de ces deux ensembles, nous pouvons
maintenant comprendre les conditions suffisantes qu'il faut imposer pour pouvoir
reconstruire.
. Muni de ces deux ensembles, nous pouvons
maintenant comprendre les conditions suffisantes qu'il faut imposer pour pouvoir
reconstruire.
Du fait du théorème de section centrale, l'objet à imager
![]() est déterminé, si dans l'espace de Fourier, nous disposons de l'information
est déterminé, si dans l'espace de Fourier, nous disposons de l'information
![]() pour toutes les fréquences
pour toutes les fréquences
![]() . De par l'équation
Eq.7.5, il faut pour chaque fréquence
. De par l'équation
Eq.7.5, il faut pour chaque fréquence
![]() que l'intersection
entre
que l'intersection
entre ![]() et
et
![]() soit non nulle.
soit non nulle.
Il doit exister au moins une direction ![]() qui construit
dans l'espace de Fourier un plan contenant cette fréquence !
qui construit
dans l'espace de Fourier un plan contenant cette fréquence !
Nous venons de le voir, toute direction correspond à une cercle équatorial unique, Le théorème d'Orlov est donc le suivant:
La reconstruction de l'objet est possible si tout cercle équatorial
à au moins une intersection non vide avec l'ensemble des projections possibles
![]() .
.
Si on reprend les exemples d'ensembles de projections illustrés sur la Fig.7.7,
|
[ |
[ |
|

|
|
[ |
[ |

|
|
Arrêtons nous quelques instants sur le cas limite de l'acquisition 2D. Pour
toute fréquence
![]() (
(
![]() ), le
cercle équatorial
), le
cercle équatorial
![]() intercepte l'ensemble des projections
intercepte l'ensemble des projections
![]() (qui correspond lui aussi à un cercle équatorial) en 2 points.
Cela revient à dire qu'il existe 2 directions de projection pour lesquelles
le plan
(qui correspond lui aussi à un cercle équatorial) en 2 points.
Cela revient à dire qu'il existe 2 directions de projection pour lesquelles
le plan ![]() contient la fréquence considérée. Ces deux directions sont
en opposition (180
contient la fréquence considérée. Ces deux directions sont
en opposition (180![]() l'une de l'autre) et sont donc équivalentes.
Elles correspondent à un même couple de détecteurs. Cela veut dire que nous
avons, pour chaque fréquence, une seule direction de projection qui contribue
à cette fréquence. Nous avons donc un rapport d'une direction pour une fréquence.
l'une de l'autre) et sont donc équivalentes.
Elles correspondent à un même couple de détecteurs. Cela veut dire que nous
avons, pour chaque fréquence, une seule direction de projection qui contribue
à cette fréquence. Nous avons donc un rapport d'une direction pour une fréquence.
Dans le cas Full 3D, l'intersection de
![]() et
et ![]() conduit toujours à
conduit toujours à
![]() . Nous avons donc un rapport de
. Nous avons donc un rapport de ![]() directions pour une fréquence. Ceci illustre bien la redondance des données
lorsqu'on réalise une acquisition 3D.
directions pour une fréquence. Ceci illustre bien la redondance des données
lorsqu'on réalise une acquisition 3D.
Dans ces 2 cas (acquisition 2D ou Full 3D), le rapport du nombre de projection(s)
par direction est constant quelle que soit la fréquence considérée. En revanche,
pour une acquisition cylindrique, ce ratio n'est plus constant et dépend de
la fréquence considérée. En effet, l'intersection de
![]() et
et ![]() conduit à un arc de cercle, dont la longueur dépend de la
fréquence. Or le ratio fréquence/coupure est justement lié à cette longueur.
Ainsi, dans ce cas pratique fréquent, il est nécessaire de prendre en compte
la variabilité de la redondance au moment de la reconstruction, i.e. l'intégrer
à notre filtre de reconstruction.
conduit à un arc de cercle, dont la longueur dépend de la
fréquence. Or le ratio fréquence/coupure est justement lié à cette longueur.
Ainsi, dans ce cas pratique fréquent, il est nécessaire de prendre en compte
la variabilité de la redondance au moment de la reconstruction, i.e. l'intégrer
à notre filtre de reconstruction.
Nous considérons le cas de la reconstruction par FBP. Evidemment et comme son nom l'indique, nous avons d'abord une étape de filtrage suivie d'une rétroprojection. Le filtrage des données ne consiste plus uniquement en un simple filtre rampe car il doit intégrer la variabilité des redondances.
Chaque projection est filtrée.
![]() représente
le noyau de filtrage, que nous spécifierons par la suite, exprimé dans l'espace
de Fourier. Le filtrage se traduit juste par une multiplication:
représente
le noyau de filtrage, que nous spécifierons par la suite, exprimé dans l'espace
de Fourier. Le filtrage se traduit juste par une multiplication:

Comme précédemment, la rétroprojection consiste à affecter à la position ![]() la valeur du sinogramme en
la valeur du sinogramme en
![]() (endroit où se projette ce
point) pour l'ensemble
(endroit où se projette ce
point) pour l'ensemble ![]() des directions.
des directions.
Le noyau de filtrage n'est pas unique. Pour le trouver, écrivons la fonction de transfert de l'ensemble du processus que représente la mesure des projections, leur filtrage et leur rétroprojection. Pour cela, réécrivons la rétroprojection Eq.7.7 dans l'espace de Fourier:

 |
|||
 |
|||
 |
Choisir un filtre correspond donc à choisir une fonction ![]() qui vérifie
la propriété Eq.7.8. Parmis ces filtres, on distingue les
filtres
qui vérifie
la propriété Eq.7.8. Parmis ces filtres, on distingue les
filtres
![]() qui sont à
variables séparables. Pour ces filtres factorisables,
les opérations de filtrage et rétroprojection peuvent être permutées et le choix
de la fonction
qui sont à
variables séparables. Pour ces filtres factorisables,
les opérations de filtrage et rétroprojection peuvent être permutées et le choix
de la fonction
![]() , fonction positive est indifférent. Tous les
filtres conduisent à la même reconstruction en l'absence de données bruitées.
En présence de bruit, les filtres se comportent de manières différentes. Nous
allons maintenant décrire le filtre que nous utiliserons par la suite dans nos
reconstructions analytiques par rétroprojection des données filtrées.
, fonction positive est indifférent. Tous les
filtres conduisent à la même reconstruction en l'absence de données bruitées.
En présence de bruit, les filtres se comportent de manières différentes. Nous
allons maintenant décrire le filtre que nous utiliserons par la suite dans nos
reconstructions analytiques par rétroprojection des données filtrées.
Le filtre que nous utiliserons fut développé au départ par Colsher [21].
Ce filtre nécessite au départ un angle d'acceptance suivant la direction ![]() qui soit constant et limité. Nous avons vu Ch.4 ce que représentait
l'angle d'acceptance axial. Cet angle n'est pas réellement constant dans notre
cas, puisque suivant le segment envisagé, les plans pairs et les plans impairs
n'intègrent pas l'information sur le même nombre de plans de détecteurs. D'autre
part, du fait de la géométrie d'acquisition cylindrique, certaines projections
sont incomplètes. Supposons néanmoins que l'angle d'acceptance est borné par
qui soit constant et limité. Nous avons vu Ch.4 ce que représentait
l'angle d'acceptance axial. Cet angle n'est pas réellement constant dans notre
cas, puisque suivant le segment envisagé, les plans pairs et les plans impairs
n'intègrent pas l'information sur le même nombre de plans de détecteurs. D'autre
part, du fait de la géométrie d'acquisition cylindrique, certaines projections
sont incomplètes. Supposons néanmoins que l'angle d'acceptance est borné par
![]() de la sorte que toutes les directions de projections soient
telles que l'angle
de la sorte que toutes les directions de projections soient
telles que l'angle ![]() associé à la direction de projection vérifie
associé à la direction de projection vérifie
![]() . Dans ce cas, le filtre se met sous la forme:
. Dans ce cas, le filtre se met sous la forme:

Jusqu'à présent, nous avons supposé que les projections suivant une direction
![]() sont totalement mesurée. Or, du fait de la géométrie cylindrique
d'acquisition, certaines vues sont manquantes. Pour détourner ce problème, Kinahan
et Rogers ont proposé un algorithme basé sur une reprojection d'une estimée
initiale [51]. On la calcule en utilisant uniquement les projections
du sinogramme correspondant à des directions transaxiales (
sont totalement mesurée. Or, du fait de la géométrie cylindrique
d'acquisition, certaines vues sont manquantes. Pour détourner ce problème, Kinahan
et Rogers ont proposé un algorithme basé sur une reprojection d'une estimée
initiale [51]. On la calcule en utilisant uniquement les projections
du sinogramme correspondant à des directions transaxiales (![]() ).
L'ensemble de ces projections répond aux conditions d'Orlov. Partant de ces
projections et par l'utilisation d'un algorithme de reconstruction par rétroprojection
2D des données filtrées, on reconstruit un premier volume (=estimée initiale).
Ce volume est ensuite projeté afin de compléter les vues manquantes du sinogramme.
Le sinogramme alors complet sert ensuite à la reconstruction 3D. Cette procédure
est illustrée Fig.7.8.
).
L'ensemble de ces projections répond aux conditions d'Orlov. Partant de ces
projections et par l'utilisation d'un algorithme de reconstruction par rétroprojection
2D des données filtrées, on reconstruit un premier volume (=estimée initiale).
Ce volume est ensuite projeté afin de compléter les vues manquantes du sinogramme.
Le sinogramme alors complet sert ensuite à la reconstruction 3D. Cette procédure
est illustrée Fig.7.8.
Par la suite, lorsque nous parlerons de reconstruction analytique standard,
nous entendrons la rétroprojection filtrée utilisant le filtre de Colsher. Nous
nous placerons toujours juste après les différentes corrections, et l'algorithme
utilisé pour obtenir une image partant de ce sinogramme corrigé est illustré
Alg.1.


![\resizebox*{0,45\textwidth}{!}{\psfrag{nur}[][][1]{\textcolor{red}{\( \nu _{r} \...
...g{p(r,g)}[][][1]{\( p(r,\theta ) \)}\includegraphics{imgps/coupe_tranche2d.eps}}](img804.png)
![\resizebox*{0,45\textwidth}{!}{\psfrag{nur}[][][1]{\textcolor{red}{\( \nu _{r} \...
...{p(r,g)}[][][1]{\( p(r,\theta ) \)}\includegraphics{imgps/coupe_tranche2d2.eps}}](img805.png)