Il existe une grande variabilité sur le mode de discrétisation du volume, et
le choix du mode de représentation dépend fortement de l'utilisation faite du
volume. Suivant l'approche envisagée, on ajuste sa représentation. En effet,
pour une simulation Monte-Carlo des approches orientées par la forme sont préférables
tandis que pour des opérations de filtrage une approche fréquentielle est plus
appropriée. Il n'en est pas de même pour le sinogramme. En effet, comme pour
le choix du référentiel, c'est l'algorithme de reconstruction qui guide la discrétisation.
Pratiquement, on conserve une version discrétisée de l'espace défini par le
quadruplet
![]() . Il s'agit donc d'un tableau à 4 dimensions:
. Il s'agit donc d'un tableau à 4 dimensions:
La Fig.4.3 indique comment ce sinogramme est stocké en mémoire.
L'indice variant le plus rapidement est celui correspondant à
Pratiquement pour un examen effectué sur la caméra ECAT HR+ SIEMENS, chaque
plan ![]() de projection fait
de projection fait
![]() éléments et
éléments et
![]() directions sont envisagées.
Comment partant d'un empilement de 32 couronnes de 576 détecteurs (18432 détecteurs
au total) peut-on arriver à un sinogramme ayant de telles dimensions?
directions sont envisagées.
Comment partant d'un empilement de 32 couronnes de 576 détecteurs (18432 détecteurs
au total) peut-on arriver à un sinogramme ayant de telles dimensions?
On pourrait croire de prime abord que tout couple de détecteurs choisi parmi
les 18432 détecteurs peut donner lieu à une LOR. Le sinogramme constituerait
alors en une simple énumération de ces
![]() couples
de détecteurs possibles.3.2 Or, nous l'avons dit, pour la reconstruction standard des données, cette solution
n'a pas été retenue.
couples
de détecteurs possibles.3.2 Or, nous l'avons dit, pour la reconstruction standard des données, cette solution
n'a pas été retenue.
Fixons l'angle ![]() à 0 et recherchons pour cet angle, quels sont les
couples susceptibles d'être appariés pour former une LOR.
à 0 et recherchons pour cet angle, quels sont les
couples susceptibles d'être appariés pour former une LOR. ![]() est nul,
les lignes de coïncidences correspondent donc à des directions
est nul,
les lignes de coïncidences correspondent donc à des directions ![]() et s'inscrivent dans des plans transaxiaux. Du fait de l'orientation du cylindre
(empilement de couronnes), considérer un plan transaxial revient à apparier
des détecteurs d'une seule et même couronne (les couronnes sont dans des plans
transaxiaux). Chacune des 32 couronnes comporte 576 détecteurs. Un détecteur
de
et s'inscrivent dans des plans transaxiaux. Du fait de l'orientation du cylindre
(empilement de couronnes), considérer un plan transaxial revient à apparier
des détecteurs d'une seule et même couronne (les couronnes sont dans des plans
transaxiaux). Chacune des 32 couronnes comporte 576 détecteurs. Un détecteur
de ![]() sur une couronne devrait donc avoir la possibilité d'être apparié
avec un des
sur une couronne devrait donc avoir la possibilité d'être apparié
avec un des
![]() détecteurs possibles de
détecteurs possibles de ![]() . En fait,
plutôt que de chercher pour un détecteur quels sont ceux que l'on peut lui apparier,
nous allons grouper les couples de détecteurs par direction. Par exemple, sur
la Fig.4.4, plutôt que de chercher la famille des détecteurs
. En fait,
plutôt que de chercher pour un détecteur quels sont ceux que l'on peut lui apparier,
nous allons grouper les couples de détecteurs par direction. Par exemple, sur
la Fig.4.4, plutôt que de chercher la famille des détecteurs
![]() pouvant former avec
pouvant former avec ![]() une LOR, on constate que les
couples
une LOR, on constate que les
couples ![]() ,
,
![]() et
et
![]() se regroupent
sous une même direction de projection (en vert sur la figure). De même, les
couples de détecteurs
se regroupent
sous une même direction de projection (en vert sur la figure). De même, les
couples de détecteurs ![]() ,
,
![]() et
et
![]() (en rouge) ou
(en rouge) ou ![]() ,
,
![]() et
et
![]() (en
bleu) se regroupent sous un même angle de vue
(en
bleu) se regroupent sous un même angle de vue ![]() .
Ceci nous amènerait à envisager
.
Ceci nous amènerait à envisager
![]() directions de projections
ou angles de vue. Or, nous n'avons que 144 angles de vues !
directions de projections
ou angles de vue. Or, nous n'avons que 144 angles de vues !
Pour un angle de vue ![]() , nous avons normalement
, nous avons normalement
![]() couples de détecteurs se regroupant sous cette direction. Ceci devrait nous
conduire à
couples de détecteurs se regroupant sous cette direction. Ceci devrait nous
conduire à ![]() valeurs de
valeurs de ![]() par direction. Comme le champ de vue
est restreint, seul
par direction. Comme le champ de vue
est restreint, seul ![]() couples sur les
couples sur les ![]() possibles sont envisagés
pour une direction
possibles sont envisagés
pour une direction ![]() (Fig.4.4)
(Fig.4.4)
|
[Regroupement des couples suivant des angles de vues (
![\resizebox*{0,4\textwidth}{!}{\psfrag{PiC}[][][2]{\( \Pi _{C} \)} \psfrag{PiB}[]...
...2]{\( D \)}
\psfrag{D1}[][][2]{\( D_{1} \)} \includegraphics{imgps/sg_fig24.ps}}](img292.png) [Champ de vue pour un angle de vue [Champ de vue pour un angle de vue ![\resizebox*{0,4\textwidth}{!}{\psfrag{PiC}[][][2]{\( \Pi _{C} \)} \psfrag{PiB}[]...
...2]{\( D \)}
\psfrag{D1}[][][2]{\( D_{1} \)} \includegraphics{imgps/sg_fig23.ps}}](img293.png)
|
Quelle est l'origine de cette réduction du nombre de vues d'un facteur deux et de cette augmentation dans un facteur deux du nombre de projections par vue? Ce facteur deux que nous observons provient d'un entrelaçage des vues. Pour comprendre l'intérêt de cet entrelaçage, arrêtons nous Fig.4.5

|

|
Précédemment nous avions fixé l'angle ![]() à 0. Cela nous permettait
de ne considérer qu'une couronne de détecteurs et nous pouvions parler de plan
transaxial. Cela nous permettait de dessiner sur une feuille (et donc dans un
plan) une tranche du cylindre de détecteurs. Toutes les lignes de coïncidences
que nous envisagions s'inscrivaient dans ces plans transaxiaux. En faisant varier
à 0. Cela nous permettait
de ne considérer qu'une couronne de détecteurs et nous pouvions parler de plan
transaxial. Cela nous permettait de dessiner sur une feuille (et donc dans un
plan) une tranche du cylindre de détecteurs. Toutes les lignes de coïncidences
que nous envisagions s'inscrivaient dans ces plans transaxiaux. En faisant varier
![]() et
et ![]() , nous décrivions des LOR situées dans un plan transaxial
à une hauteur
, nous décrivions des LOR situées dans un plan transaxial
à une hauteur ![]() (fixée par la couronne envisagée).
(fixée par la couronne envisagée).
Dans le référentiel théorique envisagé précédemment (Par.4.2),
pour tout angle ![]() fixé, qu'il soit nul ou non, nous décrivons
un plan lorsque nous faisons varier les variables
fixé, qu'il soit nul ou non, nous décrivons
un plan lorsque nous faisons varier les variables ![]() et
et ![]() .
C'est ce plan que nous appellerons Plan de détecteurs.
Ainsi, les plans transaxiaux associés à chaque couronne correspondent à un cas
particulier des plans de détecteurs. Cependant, si tout se passe bien lorsque
l'angle
.
C'est ce plan que nous appellerons Plan de détecteurs.
Ainsi, les plans transaxiaux associés à chaque couronne correspondent à un cas
particulier des plans de détecteurs. Cependant, si tout se passe bien lorsque
l'angle ![]() est nul, les choses se compliquent lorsque nous envisageons
une inclinaison non nulle. Pour s'en persuader, il suffit de regarder la Fig.4.7.
est nul, les choses se compliquent lorsque nous envisageons
une inclinaison non nulle. Pour s'en persuader, il suffit de regarder la Fig.4.7.
[Plan de détecteurs théorique et son approximation.]
 [Référentiel associé au plan de détecteurs.] [Référentiel associé au plan de détecteurs.]

|
Nous avons précédemment montré comment partant des lignes de coïncidences
qui présentent la même direction que le couple de détecteurs
![]() nous pouvions construire un plan de détecteurs
nous pouvions construire un plan de détecteurs
![]() .
Nous devrions donc avoir normalement autant de plans
.
Nous devrions donc avoir normalement autant de plans ![]() dans notre
sinogramme qu'il existe de couronnes.
dans notre
sinogramme qu'il existe de couronnes.
Mais un plan de détecteurs regroupe et comptabilise plusieurs LOR d'inclinaisons différentes.
Considérons que les détecteurs sont situés sur une même couronne (![]() ).
Une ligne de coïncidence
).
Une ligne de coïncidence
![]() comptant les photons
comptant les photons ![]() émis suivant la direction
émis suivant la direction ![]() associée à
associée à
![]() dans
la portion de l'espace définie par ces deux détecteurs
dans
la portion de l'espace définie par ces deux détecteurs ![]() et
et ![]() (parallélépipède
en vert Fig.4.8) est enregistrée au niveau du plan de détecteurs
(parallélépipède
en vert Fig.4.8) est enregistrée au niveau du plan de détecteurs
![]() (
(
![]() fixé)
fixé)
![$\displaystyle \widehat{(\overrightarrow{OA},\vec{n})}\in \left[ \frac{-\phi _{acceptance}}{2},\frac{\phi _{acceptance}}{2}\right] $](img330.png)
En groupant différentes inclinaisons au sein d'un même plan, on augmente le
nombre de paires de photons ![]() qui y sont détectés. Cet artifice
a d'abord été utilisé pour augmenter la sensibilité des imageurs TEP destinés
à faire des acquisitions du corps complet. En effet, pour de tels examens, on
réalise des acquisitions courtes, donc présentant une mauvaise statistique.
On l'améliore en regroupant certaines lignes de coïncidence au sein d'un
même plan de détecteurs.[24]. Toutefois, ce regroupement introduit
un flou sur la résolution spatiale. Ce flou est d'autant plus important que
l'on s'éloigne du centre du champ de vue. Un angle d'acceptance important conduit
à une dégradation importante de la résolution. En revanche, au vu du rayon des
couronnes de détecteurs vis à vis du champ généralement imagé, cette dégradation
reste limitée pour un angle d'acceptance choisi de façon judicieuse.
qui y sont détectés. Cet artifice
a d'abord été utilisé pour augmenter la sensibilité des imageurs TEP destinés
à faire des acquisitions du corps complet. En effet, pour de tels examens, on
réalise des acquisitions courtes, donc présentant une mauvaise statistique.
On l'améliore en regroupant certaines lignes de coïncidence au sein d'un
même plan de détecteurs.[24]. Toutefois, ce regroupement introduit
un flou sur la résolution spatiale. Ce flou est d'autant plus important que
l'on s'éloigne du centre du champ de vue. Un angle d'acceptance important conduit
à une dégradation importante de la résolution. En revanche, au vu du rayon des
couronnes de détecteurs vis à vis du champ généralement imagé, cette dégradation
reste limitée pour un angle d'acceptance choisi de façon judicieuse.
Trois termes sont nécessaires pour caractériser l'acceptance: le brassage (mashing), l'écartement (span), et l'écart maximum entre couronnes. Le brassage est utilisé pour définir l'angle d'acceptance transaxial tandis que l'écartement et l'écart maximum entre couronnes servent à décrire l'angle d'acceptance axial.
Rappelons que l'entrelaçage des vues permet de multiplier par deux le nombre de vues (Par.4.4.2). En l'état, ceci correspond à un brassage valant 0. Si deux projections adjacentes sont additionnées pour n'en former plus qu'une seule, la valeur du brassage est de 1. Une valeur de 2 pour le brassage revient à combiner ensemble quatre projections adjacentes.
Nous avons vu (Par.4.4.4), comment, au sein d'un même plan de détecteurs,
nous pouvions regrouper plusieurs LOR d'angles d'inclinaison différents. Toutefois
dans cette description, certains couples de détecteurs n'ont pas été envisagés.
Au niveau de quel plan de détecteurs sont comptés les photons ![]() détectés par les couples de détecteurs
détectés par les couples de détecteurs
![]() et
et
![]() et leur homologues? On constate Fig.4.9
et leur homologues? On constate Fig.4.9
L'écartement est donc toujours un nombre impair correspondant à la somme du nombre de couples de détecteurs pris en compte pour les plans pairs et de celui des plans impairs.
Le regroupement d'un certain nombre de couples de détecteurs a permis de manière
artificielle d'augmenter le nombre de plans ![]() . Cette augmentation
correspond à une diminution du pas d'échantillonnage suivant la direction axiale
(diminution de la distance entre 2 plans de détecteurs). En apparence, tout
se passe comme si la mesure avait été faite avec des détecteurs fictifs plus
petits. Une fois acquis et en vue de la reconstruction, on considère que chaque
quadruplet
. Cette augmentation
correspond à une diminution du pas d'échantillonnage suivant la direction axiale
(diminution de la distance entre 2 plans de détecteurs). En apparence, tout
se passe comme si la mesure avait été faite avec des détecteurs fictifs plus
petits. Une fois acquis et en vue de la reconstruction, on considère que chaque
quadruplet
![]() correspond à une ligne de coïncidence
dont la direction est fixée effectivement par une droite joignant deux de ces
détecteurs fictifs. Les
correspond à une ligne de coïncidence
dont la direction est fixée effectivement par une droite joignant deux de ces
détecteurs fictifs. Les ![]() plans du sinogramme sont alors tous de
même nature, et on oublie au moment de la reconstruction le regroupement de
lignes de coïncidence effectué lors de l'acquisition.
plans du sinogramme sont alors tous de
même nature, et on oublie au moment de la reconstruction le regroupement de
lignes de coïncidence effectué lors de l'acquisition.
Nous avons jusqu'à présent entrevu comment, partant de la géométrie initiale
de la caméra, nous pouvions modifier le triplet
![]() .
L'entrelaçage des vues nous permet de jouer sur
.
L'entrelaçage des vues nous permet de jouer sur ![]() et
et
![]() tandis que l'écartement nous permet de jouer sur
tandis que l'écartement nous permet de jouer sur ![]() . Pour aller plus
loin dans la compréhension de la détermination de
. Pour aller plus
loin dans la compréhension de la détermination de ![]() mais aussi du
nombre d'inclinaisons
mais aussi du
nombre d'inclinaisons ![]() , nous pouvons faire appel à un diagramme
de visualisation développé par CTI©en collaboration avec Christian
Michel de l'université catholique de Louvain: Le Michelogramme.
, nous pouvons faire appel à un diagramme
de visualisation développé par CTI©en collaboration avec Christian
Michel de l'université catholique de Louvain: Le Michelogramme.
Il s'agit simplement d'un tableau bidimensionnel dans lequel on reporte en abscisse
l'indice ![]() des couronnes dans
des couronnes dans ![]() et en ordonnée l'indice
et en ordonnée l'indice ![]() des couronnes dans
des couronnes dans ![]() . Chaque couple
. Chaque couple ![]() pris sur ce diagramme
traduit la mise en correspondance entre un détecteur de
pris sur ce diagramme
traduit la mise en correspondance entre un détecteur de ![]() pris sur
la couronne d'indice
pris sur
la couronne d'indice ![]() et un détecteur de
et un détecteur de ![]() pris sur la couronne
d'indice
pris sur la couronne
d'indice ![]() . Autrement dit, chaque couple de ce Michelogramme définit
l'angle
. Autrement dit, chaque couple de ce Michelogramme définit
l'angle ![]() associé à un plan de détecteurs. Pour un couple
associé à un plan de détecteurs. Pour un couple ![]() ,
on obtient une série de plan correspondant à un
,
on obtient une série de plan correspondant à un ![]() (lié à
(lié à
![]() )
et à un
)
et à un ![]() (lié à
(lié à ![]() ) fixés. Si on suppose, pour l'exemple,
que
) fixés. Si on suppose, pour l'exemple,
que ![]() comme
comme ![]() sont sur la couronne d'indice 6, le couple
sont sur la couronne d'indice 6, le couple
![]() définit un plan de détecteurs
définit un plan de détecteurs
![]() transaxial.
Ce plan transaxial coupe le cylindre à hauteur de la 6
transaxial.
Ce plan transaxial coupe le cylindre à hauteur de la 6
![]() couronne. Un écartement
couronne. Un écartement ![]() de 9 nous conduit à intégrer au sein
du plan
de 9 nous conduit à intégrer au sein
du plan
![]() , d'inclinaison nulle, les lignes de coïncidences
détectées suivant les plans de détecteurs d'inclinaison non nulle
, d'inclinaison nulle, les lignes de coïncidences
détectées suivant les plans de détecteurs d'inclinaison non nulle
![]() ,
,
![]() ,
,
![]() et
et
![]() .
On trace alors sur le Michelogramme (Fig.4.10) un segment de droite
joignant les couples
.
On trace alors sur le Michelogramme (Fig.4.10) un segment de droite
joignant les couples ![]() pour
pour
![]() ,
, ![]() pour
pour
![]() ,
, ![]() pour
pour
![]() ,
,
![]() pour
pour
![]() et
et ![]() pour
pour
![]() .
.
![\resizebox*{0,5\textwidth}{!}{\psfrag{A}[][][0.7]{\( A_{i} \)} \psfrag{B}[][][0....
...{i+2} \)}
\psfrag{J}[][][0.7]{\( B_{i-2} \)}\includegraphics{imgps/sg_fig12.ps}}](img359.png)
|
Tous les plans obtenus (pairs et impairs) sont des plans transaxiaux
![]() dont les indices
dont les indices ![]() et
et ![]() sont égaux. Cette série de couples d'indice
sont égaux. Cette série de couples d'indice
![]() se répartie autour de la droite
se répartie autour de la droite ![]() (droite bleue sur la
Fig.4.10). Un plan de détecteurs pair intègre de l'information
venant de 5 angles d'inclinaisons différents, un plan impair l'intègre seulement
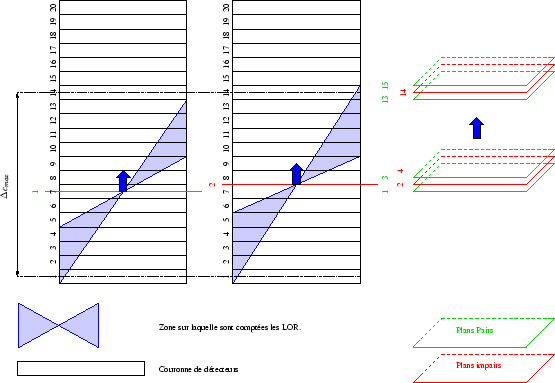
sur 4. La Fig.4.11 donne la signification de deux des lignes tracées
sur le Michelogramme Fig.4.10 correspondant aux plans de détecteurs
d'indice 11 et 12. Partant de
(droite bleue sur la
Fig.4.10). Un plan de détecteurs pair intègre de l'information
venant de 5 angles d'inclinaisons différents, un plan impair l'intègre seulement
sur 4. La Fig.4.11 donne la signification de deux des lignes tracées
sur le Michelogramme Fig.4.10 correspondant aux plans de détecteurs
d'indice 11 et 12. Partant de ![]() couronnes, on construit
couronnes, on construit
![]() plans.
plans.
Les premiers et les derniers plans du sinogramme intègrent les paires de photons sur un nombre plus faible de couples de détecteurs (segments de droite plus courts sur le Michelogramme). En effet, il existe des cas où il n'y a pas de détecteur en dessus ou au dessous d'un capteur. Si il a 20 couronnes, il n'y a pas de détecteur au dessus pour un capteur situé sur la couronne 20. Le cylindre est de dimension finie!
Toutes les portions de droites dessinées sur le Michelogramme correspondent
à des plans de détecteurs présentant le même angle d'inclinaison
![]() .
En effet, tous les couples de détecteurs se regroupent dans des plans transaxiaux
.
En effet, tous les couples de détecteurs se regroupent dans des plans transaxiaux
![]() dont la différence d'indice entre couronne est
nulle (
dont la différence d'indice entre couronne est
nulle (
![]() ). On regroupe l'ensemble de ces plans
de détecteurs (il existe autant de plans de détecteurs que de segments de droite
sur le Michelogramme) dans un tableau à 3 dimensions
). On regroupe l'ensemble de ces plans
de détecteurs (il existe autant de plans de détecteurs que de segments de droite
sur le Michelogramme) dans un tableau à 3 dimensions
![]() que
l'on nomme Segment. Le segment
regroupe tous les plans de détecteurs présentant un même angle d'inclinaison
(un même
que
l'on nomme Segment. Le segment
regroupe tous les plans de détecteurs présentant un même angle d'inclinaison
(un même
![]() ). Sur le Michelogramme, Fig.4.10
est représenté le segment pour un angle
). Sur le Michelogramme, Fig.4.10
est représenté le segment pour un angle
![]() (premier segment
ou segment 0). Or, le sinogramme mémorise plusieurs angles d'inclinaison (
(premier segment
ou segment 0). Or, le sinogramme mémorise plusieurs angles d'inclinaison (![]() ).
Nous avons donc autant de segments que de valeurs de l'angle
).
Nous avons donc autant de segments que de valeurs de l'angle ![]() , c'est
à dire
, c'est
à dire ![]() segments.
segments.
Un segment correspond à une portion
![]() d'un sinogramme
d'un sinogramme
![]() pour un angle d'inclinaison
pour un angle d'inclinaison ![]() particulier.
particulier.
Chaque couple ![]() du Michelogramme et donc tout couple de détecteurs
ne peut être utilisé qu'une seule fois. Un couple de détecteurs est compté dans
un plan de détecteurs particulier et un seul. Sur le Michelogrammse, les groupes
de portions de droite correspondant à deux segments différents doivent donc
être disjoints. Sur la Michelogramme Fig.4.12, on retrouve le premier
segment décrit précédemment, mais aussi deux autres segments correspondant à
des inclinaisons
du Michelogramme et donc tout couple de détecteurs
ne peut être utilisé qu'une seule fois. Un couple de détecteurs est compté dans
un plan de détecteurs particulier et un seul. Sur le Michelogrammse, les groupes
de portions de droite correspondant à deux segments différents doivent donc
être disjoints. Sur la Michelogramme Fig.4.12, on retrouve le premier
segment décrit précédemment, mais aussi deux autres segments correspondant à
des inclinaisons ![]() non nulles (Segment +1 (
non nulles (Segment +1 (![]() )
et Segment -1 (
)
et Segment -1 (
![]() ) ).
) ).

|
Du fait de l'écartement, et même si finalement les plans de détecteurs du premier
segment sont des plans transaxiaux, ils intègrent de l'information venant de
détecteurs placés sur des couronnes différentes. Les capteurs ![]() et
et
![]() , par exemple, induisent une différence
, par exemple, induisent une différence
![]() . Pour
le segment
. Pour
le segment ![]() , caractérisé par un angle d'inclinaison
, caractérisé par un angle d'inclinaison ![]() particulier, on peut définir une différence d'indice entre couronnes
particulier, on peut définir une différence d'indice entre couronnes ![]() minimale
minimale
![]() (une différence maximale
(une différence maximale
![]() ).
Les valeurs de
).
Les valeurs de
![]() et
et
![]() dépendent du segment considéré mais aussi de la valeur de l'écartement
dépendent du segment considéré mais aussi de la valeur de l'écartement ![]() .
Pour le premier segment (segment 0) avec un écartement de 9 (Fig.4.11),
la différence maximale
.
Pour le premier segment (segment 0) avec un écartement de 9 (Fig.4.11),
la différence maximale
![]() est de 4 (calculée
sur les capteurs
est de 4 (calculée
sur les capteurs ![]() et
et ![]() par exemple) alors que la différence
minimale
par exemple) alors que la différence
minimale
![]() est de -4.3.3
est de -4.3.3
Comme les couples de détecteurs ne peuvent être utilisé qu'une seule fois, la
différence
![]() peut se déduire de la différence
peut se déduire de la différence
![]() du segment précédent :
du segment précédent :
Pour le premier segment, les ![]() valeurs sont centrées sur 0. Ainsi,
il y a
valeurs sont centrées sur 0. Ainsi,
il y a
![]() valeurs pour aller de
valeurs pour aller de
![]() à
à
![]() .
.
Considérons le segment +1 illustré Fig.4.13 (l'écartement vaut 9).
Un calcul direct à partir de cette Fig.4.13 nous conduit à
![]() et
et
![]() . Ces valeurs de différence sont
en accord avec les lois énoncées précédemment
. Ces valeurs de différence sont
en accord avec les lois énoncées précédemment
![]() et nous avons bien
et nous avons bien ![]() valeurs entre
valeurs entre
![]() et
et
![]() . Pour le segment -1, nous obtenons :
. Pour le segment -1, nous obtenons :
![]() et
et
![]() . Les segments -1 et +1 sont miroirs
l'un de l'autre.
. Les segments -1 et +1 sont miroirs
l'un de l'autre.
On peut donc définir maintenant l'écart maximum entre couronnes
qui correspond à la différence maximale d'indice calculée sur l'ensemble des
![]() segments du sinogramme :
segments du sinogramme :
Dans l'exemple précédent, si le sinogramme ne comportait que les segments 0,
+1, -1, l'écart maximum entre couronnes
![]() serait:
serait:
Ce qu'il faut comprendre et surtout retenir dans tout cela, c'est que le nombre
de segments ![]() (ou nombre d'inclinaisons) est lié de façon univoque
:
(ou nombre d'inclinaisons) est lié de façon univoque
:

Ceci, correspond sur le Michelogramme, au nombre maximum de groupes de segments de droite disjoints que l'on peut dessiner.
Pour un examen courant sur la caméra ECAT HR+ standard, l'écartement vaut 9 et l'écart maximum entre couronne vaut 22. Ceci contraint le nombre de segments à

Nous voyons que l'élaboration d'un sinogramme correspond à un jeu subtil de
mise en correspondance de couples de détecteurs. Dans un sinogramme, chaque
segment correspond à un angle d'inclinaison donné ![]() caractérisé
par une différence d'indice entre couronnes
caractérisé
par une différence d'indice entre couronnes
![]() . Il parait
évident que si l'angle
. Il parait
évident que si l'angle ![]() est non nul, i.e. si le segment correspond
à une acquisition oblique, le nombre possible des plans de détecteurs diminue.
Certains couples de détecteurs ne pouvant plus être appariés, car la différence
est non nul, i.e. si le segment correspond
à une acquisition oblique, le nombre possible des plans de détecteurs diminue.
Certains couples de détecteurs ne pouvant plus être appariés, car la différence
![]() conduit à des détecteurs situés en dehors de l'empilement
des couronnes (Fig.4.14).
conduit à des détecteurs situés en dehors de l'empilement
des couronnes (Fig.4.14).
[Segment correspondant à ![\resizebox*{0,4\textwidth}{!}{\psfrag{Deltac}[b][][2]{\( \Delta c \)}\includegraphics{imgps/sg_fig21.ps}}](img416.png) [Segment correspondant à [Segment correspondant à
![\resizebox*{0,4\textwidth}{!}{\psfrag{Deltac}[b][][2]{\( \Delta c \)}\includegraphics{imgps/sg_fig22.ps}}](img418.png)
|
Nous résumons dans le tableau Tab.4.1
|
Afin d'illustrer les nombreux concepts énoncés, propres à une acquisition de géométrie cylindrique, nous allons donner les deux modes de représentation du sinogramme les plus fréquents.
De manière imagée (Fig.4.15), on peut se représenter le sinogramme
par la donnée d'un plan ![]() défini par
défini par
![]() qui
tourne autour de l'objet émettant (lorsque
qui
tourne autour de l'objet émettant (lorsque
![]() varient).
varient).
On peut donc dans un premier temps visualiser le sinogramme suivant un de ces
plans ![]() . On fixe l'angle de vue
. On fixe l'angle de vue ![]() et on représente le
plan
et on représente le
plan ![]() correspondant à 3 segments d'inclinaison différente (Fig.4.16)
correspondant à 3 segments d'inclinaison différente (Fig.4.16)
|
|
Une deuxième façon de voir les choses consiste à fixer une valeur de ![]() dans un segment particulier (
dans un segment particulier (![]() fixé), on obtient alors des images
bidimensionnelles (Fig.4.17)
fixé), on obtient alors des images
bidimensionnelles (Fig.4.17)
|
|
![\resizebox*{0,5\textwidth}{!}{\psfrag{r}[][][2]{\textcolor{blue}{\( r \)}} \psfr...
...rag{phi}[][][2]{\textcolor{blue}{\( \phi \)}}\includegraphics{imgps/sg_fig5.ps}}](img275.png)