Dans ce type d'approche, on va chercher à estimer de manière globale, le nombre
d'émissions vues par un couple de détecteurs et donc par un quadruplet particulier
![]() du sinogramme.
du sinogramme.
Toute portion radioactive de l'espace émet des photons ![]() en opposition
de manière isotrope. Pour cette portion de l'espace, une petite partie seulement
de ces émissions va se produire suivant la direction
en opposition
de manière isotrope. Pour cette portion de l'espace, une petite partie seulement
de ces émissions va se produire suivant la direction ![]() . Pour que,
de plus, ces photons
. Pour que,
de plus, ces photons ![]() soient comptabilisés par le couple de détecteurs
soient comptabilisés par le couple de détecteurs
![]() (on suppose pour l'instant l'absence de phénomènes perturbateurs),
il faut qu'ils soient émis sur la droite
(on suppose pour l'instant l'absence de phénomènes perturbateurs),
il faut qu'ils soient émis sur la droite ![]() joignant ces deux capteurs:
la portion de l'espace envisagée doit appartenir à cette droite. Ainsi, tout
couple de détecteurs
joignant ces deux capteurs:
la portion de l'espace envisagée doit appartenir à cette droite. Ainsi, tout
couple de détecteurs ![]() va enregistrer toutes les paires de photons
va enregistrer toutes les paires de photons
![]() crées dans une portion de l'espace appartenant à la droite
crées dans une portion de l'espace appartenant à la droite ![]() et émises suivant la direction
et émises suivant la direction ![]() . Calculer un sinogramme revient
à affecter à tout quadruplet
. Calculer un sinogramme revient
à affecter à tout quadruplet
![]() caractérisant un couple
de détecteurs, le nombre
caractérisant un couple
de détecteurs, le nombre ![]() de photons
de photons ![]() comptés suivant
cette ligne de coïncidence durant toute la durée d'un examen:
comptés suivant
cette ligne de coïncidence durant toute la durée d'un examen:
Lorsque nous avons défini le choix de l'origine ![]() (origine dans le plan
(origine dans le plan
![]() de projection cf. Ch.4), nous avons dit qu'elle
pouvait se situer n'importe où sur la ligne de coïncidence. C'est à dire
que si nous décalons l'origine en
de projection cf. Ch.4), nous avons dit qu'elle
pouvait se situer n'importe où sur la ligne de coïncidence. C'est à dire
que si nous décalons l'origine en ![]() tel que
tel que
 alors:
alors:
 |
 |
||
 |
|||
Jusqu'à présent, nous avons toujours considéré que seules les portions de l'espace
situées sur la droite ![]() et dans la direction
et dans la direction ![]() contribuaient
à la valeur
contribuaient
à la valeur
![]() du sinogramme. Considérons maintenant
l'expression plus générale:
du sinogramme. Considérons maintenant
l'expression plus générale:
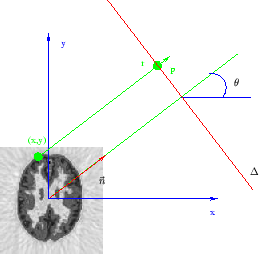
Le calcul d'un sinogramme passe par le choix d'une méthode pour estimer la projection
d'un volume sur un plan suivant une direction ![]() . Pour expliciter
les algorithmes liés à la projection et afin d'alléger notations et figures,
nous allons aborder le problème en deux dimensions.4.1 Le cas tridimensionnel s'en déduit naturellement, les principes restant les
mêmes. Notre objet devient donc bidimensionnel
. Pour expliciter
les algorithmes liés à la projection et afin d'alléger notations et figures,
nous allons aborder le problème en deux dimensions.4.1 Le cas tridimensionnel s'en déduit naturellement, les principes restant les
mêmes. Notre objet devient donc bidimensionnel ![]() . Sa version discrétisée
reste
. Sa version discrétisée
reste
![]() . Le sinogramme correspondant se définit simplement
par la projection de cet objet sur une droite
. Le sinogramme correspondant se définit simplement
par la projection de cet objet sur une droite ![]() . Cette droite est
référencée dans l'espace par la donnée du couple
. Cette droite est
référencée dans l'espace par la donnée du couple
![]() (Fig.5.2).
(Fig.5.2).

A ce niveau, Il semble indispensable de faire une remarque sur le parti pris
par la suite pour la représentation de l'objet. Nous avons exposé brièvement
qu'il existait de nombreuses représentations de l'image. Parmi celles-ci, la
représentation spatiale ![]() dans un contexte continu (celle des voxels
en discret) n'est qu'une alternative. Sa popularité vient de sa simplicité d'emploi
qui donne sans intermédiaire une représentation visuelle de l'objet. En effet,
Il y a équivalence entre les coefficients décrivant l'image et la perception
que nous en avons. Dans l'équation Eq.5.3, les coefficients
dans un contexte continu (celle des voxels
en discret) n'est qu'une alternative. Sa popularité vient de sa simplicité d'emploi
qui donne sans intermédiaire une représentation visuelle de l'objet. En effet,
Il y a équivalence entre les coefficients décrivant l'image et la perception
que nous en avons. Dans l'équation Eq.5.3, les coefficients ![]() sont étroitements liés à la base de représentation de notre objet. D'ailleurs
sont étroitements liés à la base de représentation de notre objet. D'ailleurs
![]() représente la contribution d'une fonction élémentaire de la base
de représentation à la projection. Le calcul de
représente la contribution d'une fonction élémentaire de la base
de représentation à la projection. Le calcul de ![]() pour différentes
bases de représentations peut être trouvé dans [56].
pour différentes
bases de représentations peut être trouvé dans [56].
Pour construire des projections partant d'un volume représenté par des voxels, deux approches ont été envisagées.
Cette approche est la plus simple à mettre en oeuvre (Fig.5.3)
. Pour une direction de projection possible (une direction
La valeur entière de ![]() nous conduit à un indice
nous conduit à un indice ![]() du sinogramme-tableau
du sinogramme-tableau
![]() tel que
tel que
![]() . On cherche les indices
. On cherche les indices ![]() du sinogramme
du sinogramme
![]() correspondant au couples de détecteurs vus
de ce pixel (réponse impulsionnelle) et on incrémente
les valeurs
correspondant au couples de détecteurs vus
de ce pixel (réponse impulsionnelle) et on incrémente
les valeurs ![]() des contributions
des contributions ![]() apportées par
apportées par ![]() .
.
Cette méthode élémentaire se décline sous de nombreuses variantes en fonction
de la forme de la réponse impulsionnelle choisie. On distribue l'information
contenue dans le pixel ![]() en fonction de la distance
en fonction de la distance ![]() séparant
le centre d'un détecteur d'indice
séparant
le centre d'un détecteur d'indice ![]() du point réel de projection
du point réel de projection
![]() .
A titre d'illustration, on donne deux exemples correspondant à deux réponses
impulsionnelles différentes (Fig.5.4)
.
A titre d'illustration, on donne deux exemples correspondant à deux réponses
impulsionnelles différentes (Fig.5.4)
[Interpolation linéaire.]
|
Dans ce cas, on ne répartit la contribution ![]() sur le détecteur
sur le détecteur ![]() le plus proche par valeur inférieure (
le plus proche par valeur inférieure (![]() ) et sur son successeur
) et sur son successeur
![]() , on effectue alors une simple interpolation linéaire
, on effectue alors une simple interpolation linéaire
Il est admis qu'une gaussienne est une bonne approximation permettant de modéliser
la contribution des photons directs [35,8]. Sa forme générale
dépend principalement de l'angle solide sous lequel est vu le pixel par les
détecteurs. Toutefois, si on considère une réponse impulsionnelle gaussienne
d'écart type ![]() fixe (invariance spatiale), on affecte une contribution
au détecteur
fixe (invariance spatiale), on affecte une contribution
au détecteur
![]() en fonction de
en fonction de
![$\displaystyle H_{mn}=\frac{1}{\sqrt{2\pi }\sigma }\exp [-\frac{(r-r_{i})^{2}}{2\sigma ^{2}}]$](img480.png)
L'inconvénient majeur de cette méthode vient du fait que l'image comme les projections
sont échantillonnées. Quand on parcourt l'image, le déplacement se fait par
des incréments régulier de ![]() où
où ![]() pixels. Ces déplacements,
une fois projetés, se traduisent par un pas d'échantillonnage suivant la direction
pixels. Ces déplacements,
une fois projetés, se traduisent par un pas d'échantillonnage suivant la direction
![]() tel que
tel que
![]() ou
ou
![]() .
Le sinogramme est lui même déjà échantillonné avec un pas
.
Le sinogramme est lui même déjà échantillonné avec un pas
![]() .
Le ratio
.
Le ratio
![]() n'est pas constant et dépend de la
direction de projection
n'est pas constant et dépend de la
direction de projection
![]() . De plus, il existe toujours une
direction de projection qui conduit à une situation critique produisant un effet
d'aliasing (Fig. 5.5).
. De plus, il existe toujours une
direction de projection qui conduit à une situation critique produisant un effet
d'aliasing (Fig. 5.5).

|
Dans l'approche précédente, nous parcourions le volume pour savoir à quel endroit
chaque voxel se projetait dans le sinogramme. A l'inverse, on veut savoir ici
quels sont les voxels qui contribuent à une projection donnée. On va donc parcourir
tous les dexels. Chaque dexel du sinogramme, i.e. tout indice ![]() , référence
un point
, référence
un point ![]() particulier dans le plan
particulier dans le plan ![]() de projection. D'autre
part, cet indice
de projection. D'autre
part, cet indice ![]() fixe également une direction par la donnée des deux
angles
fixe également une direction par la donnée des deux
angles
![]() . Partant du point
. Partant du point ![]() , on parcourt l'espace
suivant cette direction (sorte de lancer de rayon suivant la ligne de coïncidence)
et on intègre en
, on parcourt l'espace
suivant cette direction (sorte de lancer de rayon suivant la ligne de coïncidence)
et on intègre en ![]() les contributions, en terme de nombre de coups,
de tous les éléments de volume rencontrés sur notre parcours de la ligne de
coïncidence. Lors de ce parcours , il faut être certain d'avoir traverser
tout le volume émetteur. Or, nous avons vu que les plans de projections
les contributions, en terme de nombre de coups,
de tous les éléments de volume rencontrés sur notre parcours de la ligne de
coïncidence. Lors de ce parcours , il faut être certain d'avoir traverser
tout le volume émetteur. Or, nous avons vu que les plans de projections ![]() sont invariants pour un déplacement suivant la direction de projection
sont invariants pour un déplacement suivant la direction de projection ![]() .
On va donc placer le plan
.
On va donc placer le plan ![]() tangent à la sphère
tangent à la sphère
![]() englobant tout le volume servant à la projection (Fig.5.7.a).
englobant tout le volume servant à la projection (Fig.5.7.a).
[Choix de l'origine du plan |


![$\displaystyle p_{m}=\sum _{n\in [1,N_{x}]\times [1,N_{y}]}H_{mn}f_{n}$](img457.png)

 [Interpolation Gaussienne.]
[Interpolation Gaussienne.]


 [Parcours de la droite dans l'espace discret du volume.]
[Parcours de la droite dans l'espace discret du volume.]
